 Image Credit: Leonard Bauersfeld
Image Credit: Leonard Bauersfeld
Abstract
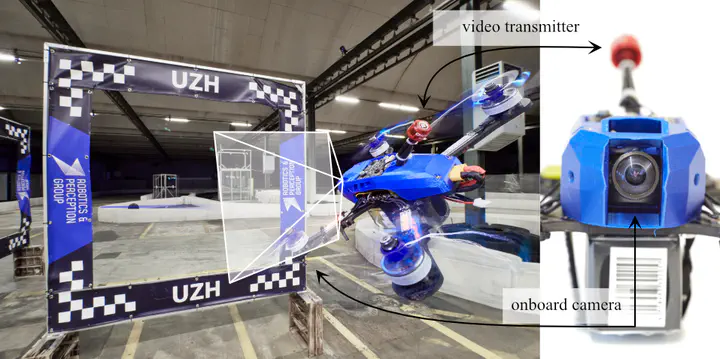
We present the first vision-based quadrotor system that autonomously navigates through a sequence of gates at high speeds while directly mapping pixels to control commands. Like professional drone-racing pilots, our system does not use explicit state estimation and leverages the same control commands humans use (collective thrust and body rates). We demonstrate agile flight at speeds up to 40km/h with accelerations up to 2g. This is achieved by training vision-based policies with reinforcement learning (RL). The training is facilitated using an asymmetric actor-critic with access to privileged information. To overcome the computational complexity during image-based RL training, we use the inner edges of the gates as a sensor abstraction. Our approach enables autonomous agile flight with standard, off-the-shelf hardware.
Leonard Bauersfeld
PhD Student
My research interests lie in the combination of classical methods and machine learning methods for modeling, perception-aware control, and vision-based state estimation for autonomous aerial vehicles.