Biography
I am a PhD student at the Robotics and Perception Group, led by Prof. Davide Scaramuzza. My research interests lie in the combination of classical methods and machine learning methods for modeling, perception-aware control, and vision-based state estimation for autonomous aerial vehicles.
In my free time, I enjoy taking photos of landscapes and astronomical objects to show how beatiful nature can be and that it’s worth protecting. I also teach photography courses at ETH Zurich.
Download my resumé.
Interests
- Perception for Robotics
- Autonomous Aerial Vehicles
- (Astro)photography
Education
-
PhD in Robotics, 2021 ‒ now
Robotics and Perception Group
-
Master in Robotics, Systems and Control, 2021
ETH Zürich
-
BSc in Mechanical Engineering, 2018
ETH Zürich





List of Publications
(2025).
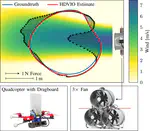
HDVIO2.0: Wind and Disturbance Estimation with Hybrid Dynamics VIO.
IEEE T-RO.
(2025).
A Monocular Event-Camera Motion Capture System.
arXiv.
(2024).
Robotics meets Fluid Dynamics: A Characterization of the Induced Airflow around a Quadrotor.
IEEE RA-L.
(2024).
Drift-Free Visual SLAM Using Digital Twins.
IEEE RA-L.
(2024).
Bootstrapping Reinforcement Learning with Imitation for Vision-Based Agile Flight.
CoRL 2024.
(2024).
Demonstrating Agile Flight from Pixels without State Estimation.
RSS 2024.
(2024).
MPCC++: Model Predictive Contouring Control for Time-Optimal Flight with Safety Constraints.
RSS 2024.
(2024).
Autonomous Drone Racing: A Survey.
IEEE T-RO.
(2024).
Contrastive Learning for Enhancing Robust Scene Transfer in Vision-Based Agile Flight.
ICRA 2024.
(2023).
Champion-Level Drone-Racing using Deep Reinforcement Learning.
Nature.
(2023).
HDVIO: Improving Localization and Disturbance Estimation with Hybrid Dynamics VIO.
RSS 2023.
(2023).
Cracking Double-Blind Review: Authorship attribution with deep learning.
PLOS ONE.
(2023).
User-Conditioned Neural Control Policies for Mobile Robotics.
ICRA 2023.
(2022).
Agilicious: Open-Source and Open-Hardware Agile Quadrotor for Vision-Based Flight.
Science Robotics.
(2022).
A Benchmark Comparison of Learned Control Policies for Agile Quadrotor Flight.
IEEE ICRA 2022.
(2022).
Range, Endurance, and Optimal Speed Estimates for Multicopters.
IEEE RA-L.
(2021).
MPC Flight Control for Tilt-Rotor VTOL Aircraft.
IEEE T-AES.
(2020).
Fused-PID Control for Tilt-Rotor VTOL Aircraft.
MED 2020.
(2019).
RTOB SLAM: Real-Time Onboard Laser-Based Localization and Mapping.
MDPI Vehicles.
(2019).
Low-Cost 3D Laser Scanner Design.
IEEE SAS 2019.
Contact
- bauersfeld (at) ifi (dot) uzh (dot) ch
- +49 (one) (five) (one) 7500 7478
- Andreasstrasse 15, Zurich, 8050
- Take the stairs to the office 2.08 on the 2nd floor